
关于电机
What is a Motor?
关于电机
关于电机
What is a Motor?
电机的基础知识
第1章
重新认识电机的体系
1-3-5 步进电机
步进电机(stepping motor)的原型是将6线圈集中绕组定子(图1.21)和凸极硅钢转子(图1.22)组合在一起,如图1.23所示,上世纪20年代的军舰(英国海军)作为指示鱼雷发射方向的传动装置而采用的电机。
该电机利用旋转式开关来切换流向线圈的电流。
图1.23的右侧使用S1、S2、S3来表示这些开关的功能。
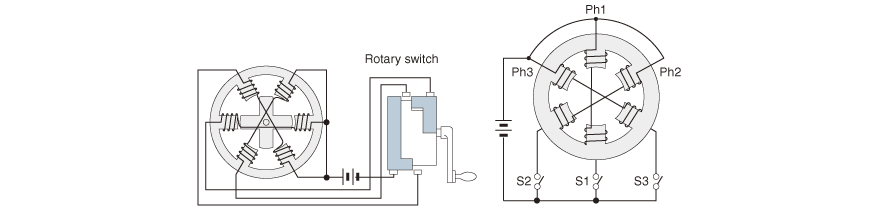
图1.23英国军舰上使用的步进电机(VR型)
而且,步进电机曾被称为step-by-step moto,后来逐渐固定表述成stepping motor及step motor。
此外,还称为stepper motor。
图1.24展示了利用切换定子线圈的电流将转子位置旋转成步距形状。

图1.24步进电机的原理(VR型)
[5]-(1) VR型步进电机
步进电机必须具备转子仅旋转某个角度,停止后可保持该位置的特性。
因此,利用的是通过电流励磁的磁极(pole:较大的齿或极点)在转子齿和磁力的作用下整齐排列的原理。
定子和转子的齿数比为6:4的结构时,基于该原理的定位分辨率为1次旋转的1/12。即,可实现间隔30°的定位。
作为实现高分辨率的策略,采用了图1.25所示的在磁极上雕刻细齿,转子的齿牙也采用与其相同的方法(图1.26)。
这样,将不使用永久磁铁的步进电机称为VR型步进电机(Variable Reluctance stepping motor)。
回顾历史,为应用于机床及计算机周边设备,曾制造了各种形式的VR型电机。
VR型的优点是通过机械加工雕刻成细齿,还可以减小定子和转子之间的间隙,从而实现高分辨率。
缺点是很难同时实现小型化和大扭矩化。因此,VR型作为步进电机,人们更趋向于使用无刷电机的其中一种,即可变磁阻电机(Switched Reluctance Motor:SRM)。
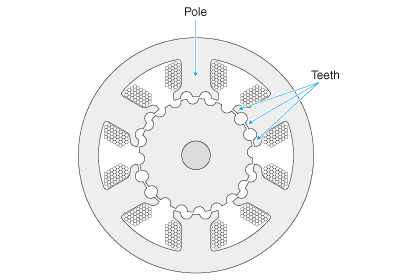
图1.25在磁极上加工齿后,分辨率(360°的分割数)会上升
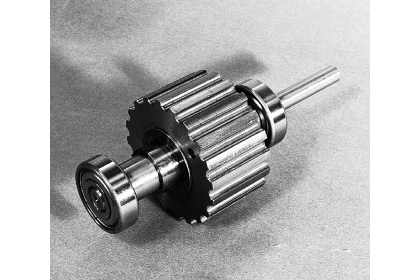
图1.26加工有细齿的软钢转子
构成VR型步进电机
[5]-(2) PM型步进电机
除VR型外,我们还开发了利用永久磁铁的PM型步进电机(Permanent Magnet stepping motor)。转子基本上使用了图1.27中的永磁转子。典型的实例有图1.28所示的4个线圈定子和2极磁铁转子的组合。这种电机广泛应用于手表中的步进电机领域。虽然很小,但仍是性能强大的永久磁铁,因此,具有电力消耗较小的特点。使用1块电池驱动包括秒针在内的3个指针,可使用几年。
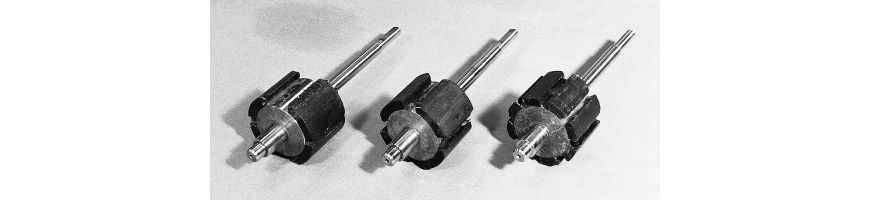
图1.27永磁转子(2、4、8极)
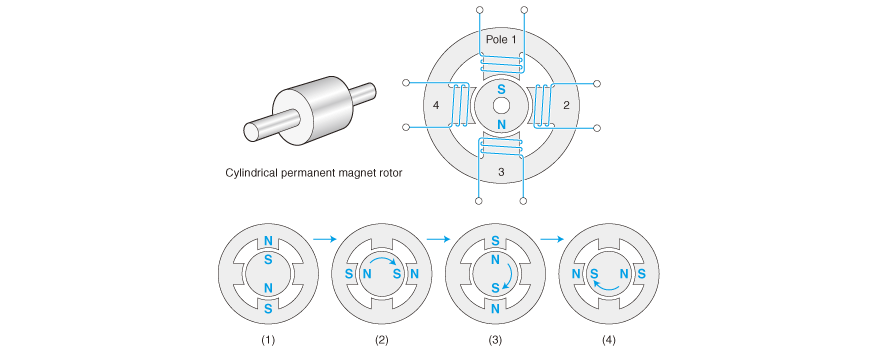
图1.28使用圆筒型永久磁铁的步进电机(PM型)
[5]-(3)混合型步进电机
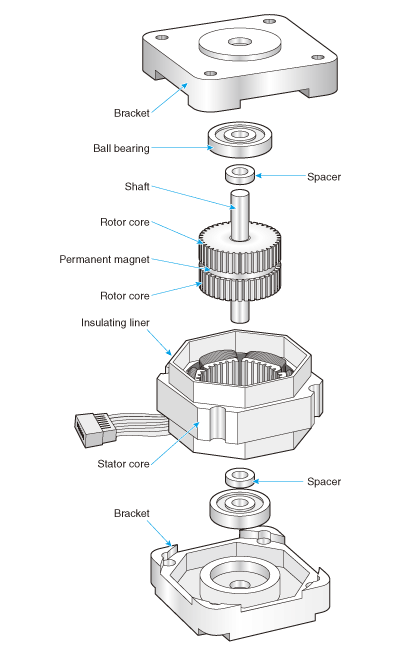
图1.29混合型步进电机的构造
- 充分发挥VR型和PM型双方优点的复合型产品是当今拥有广泛用途的混合型步进电机(hybrid stepping
motor)。生产的大多数产品为凸极式,从广义上来讲,也可视为混合型的一种。
混合原本是指生物学中的杂交种。这里,使用VR型构造,实现了细小的步距角加工,再加上永久磁铁,实现了扭矩增大。
其结构见图1.29。基本上,如图1.30中的转子结构所示,加工有齿的2个铁心将盘形的永久磁铁夹成了三明治形状。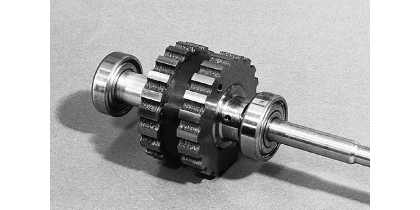
图1.30感应器型转子
铁氧体永久磁铁石被2个带齿的铁心夹成了三明治形状。该磁铁的其中一面为N极的话,则另一面为S极。垂直于轴方向的截面上只会形成N或S中的其中一个磁极。这就是单极。两侧的硅钢板会被磁极所感应,因此,称为感应器。沿轴方向观察,的确像极数较多的永磁转子。作为混合型步进电机使用。
[5]-(4) 凸极式PM步进电机
OA用设备中常用的步进电机为这种凸极式PM步进电机(claw-pole PM stepping motor)。